AUTOBarge
AUTOBarge hat das Ziel, ein europäisches Ausbildungs- und Forschungsnetzwerk zu autonomen Binnenschiffen zu schaffen, um damit neue Möglichkeiten für die intelligente Binnenschifffahrt erforschen zu können.
Kurzinfo
Projektzeitraum: Oktober 2021 – September 2025
Förderprogramm: Das Projekt wird kofinanziert durch die Europäische Union im Rahmen des EU-Horizon 2020 MSCA-Förderprogramms
Projektbudget: Gesamt rund 1,6 Mio. EUR, Förderung 100 %
Projektschwerpunkte:
Aufbau von hochqualifizierten Arbeitskräften für die autonome Binnenschifffahrt
Weiterentwicklung der wesentlichen Bausteine des SUDA-Modells eines autonomen Schiffs (Erfassen und Erkennen der Umgebung, Entscheidung über die nächste Aktion/ das nächste Manöver, entsprechendes Handeln gemäß dieser Entscheidung), die notwendig sind, damit ein autonomes Schiff die Rolle des menschlichen Kapitäns und der Besatzung übernehmen kann
Adressierung der vielen anderen soziotechnischen, logistischen, wirtschaftlichen und regulatorischen Bedingungen, die für eine erfolgreiche und zukunftssichere Implementierung von autonomen Schiffen in der Binnenschifffahrt erfüllt werden müssen
Schaffung von 15 Doktorandenstellen zur vernetzten Forschung im Rahmen des Verbundprojektes
Projektpartner und assoziierte Partner
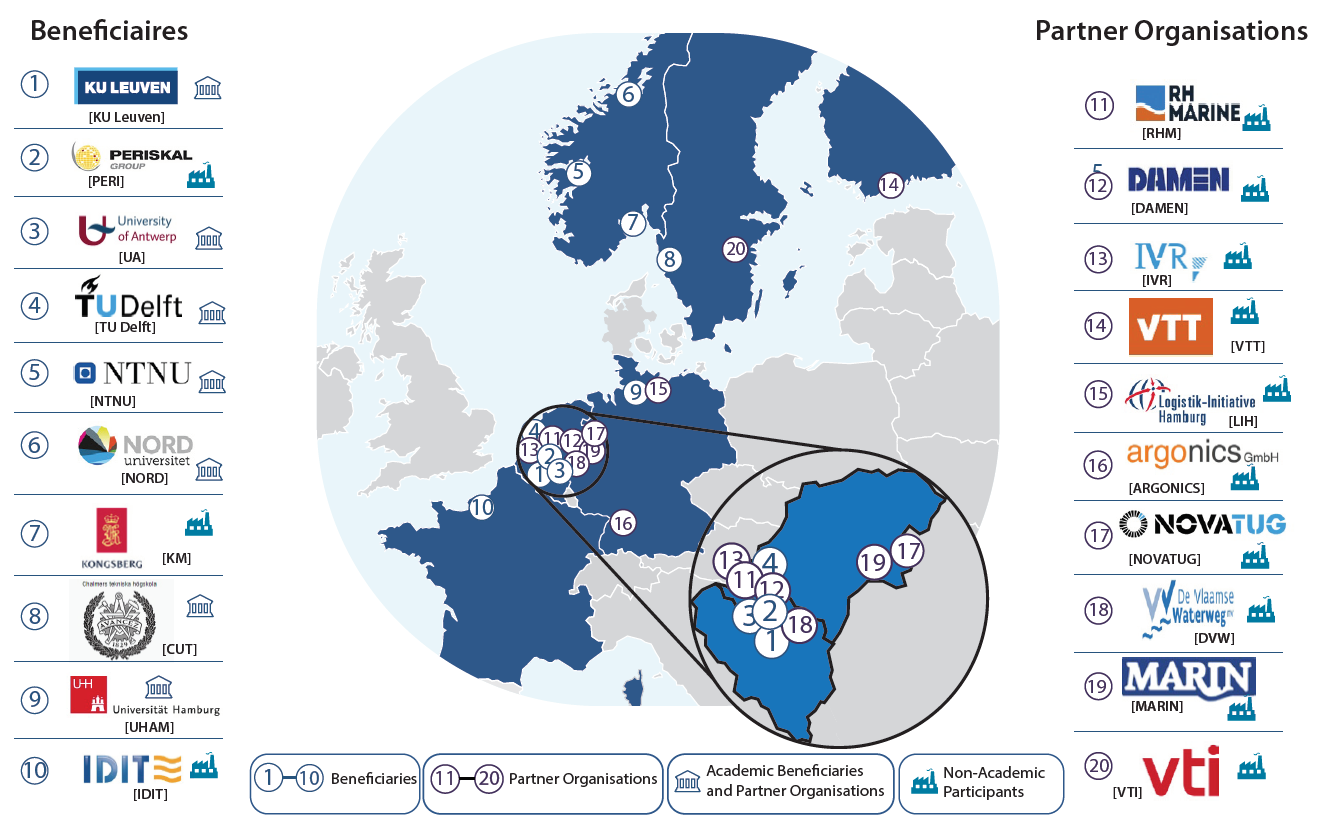
Das Projektkonsortium besteht aus 10 direkt geförderten Partnern, welche aus 6 verschiedenen Ländern stammen (Belgien, Niederlande, Norwegen, Schweden, Deutschland, Frankreich) und 7 Universitäten, 2 Hochtechnologieunternehmen und 1 außeruniversitäres Forschungsinstitut vereinen:
- KU Leuven (University of Leuven), BE
- PERISKAL, BE
- University of Antwerp, BE
- TU Delft (Delft University of Technology), NL
- The Norwegian University of Science and Technology (NTNU), NO
- Nord University, NO
- Kongsberg Maritime (KM), NO
- Chalmers University of Technology, SE
- Universität Hamburg, DE
- Institut du Droit International des Transports, FR
Das Konsortium wird durch 10 indirekt geförderte Partnerorganisation vervollständigt, zu denen 4 Unternehmen, 3 außeruniversitäre Forschungsinstitute, 2 Netzwerk-/Stakeholder-Organisationen und 1 staatliche Organisation gehören:
- RH Marine
- Damen Shipyards
- IVR
- VTT Technical Research Centre of Finland Ltd.
- Logistik-Initiative Hamburg Management GmbH
- ARGONICS GMBH
- NOVATUG
- De Vlaamse Waterweg
- Maritime Research Institute Netherlands (MARIN)
- Swedish National Road and Transport Research Institute (VTI)
In dem Projekt spielt die Logistik-Initiative Hamburg eine unterstützende Rolle, indem sie Erfahrungen und Wissen aus laufenden und abgeschlossenen relevanten Projekten (z.B. AVATAR, WACABA) mit den Projektpartner teilt. Darüber hinaus fördert die Logistik-Initiative Hamburg den aktiven Austausch zwischen Wirtschaft und Wissenschaft, indem diese den Doktoranten für deren Forschung kritische Einblicke zur Verfügung stellen.
Projektinhalte & Ziele
AUTOBarge vereint einige der erfolgreichsten und relevantesten Vertreter der europäischen Industrie und der wichtigsten akademischen Akteure und garantiert so nicht nur ein spannendes interdisziplinäres, branchenübergreifendes Forschungs- und Ausbildungsprogramm, sondern auch einen Vorsprung für die erfolgreiche Anwendung von Autonomie in der Binnenschifffahrt.
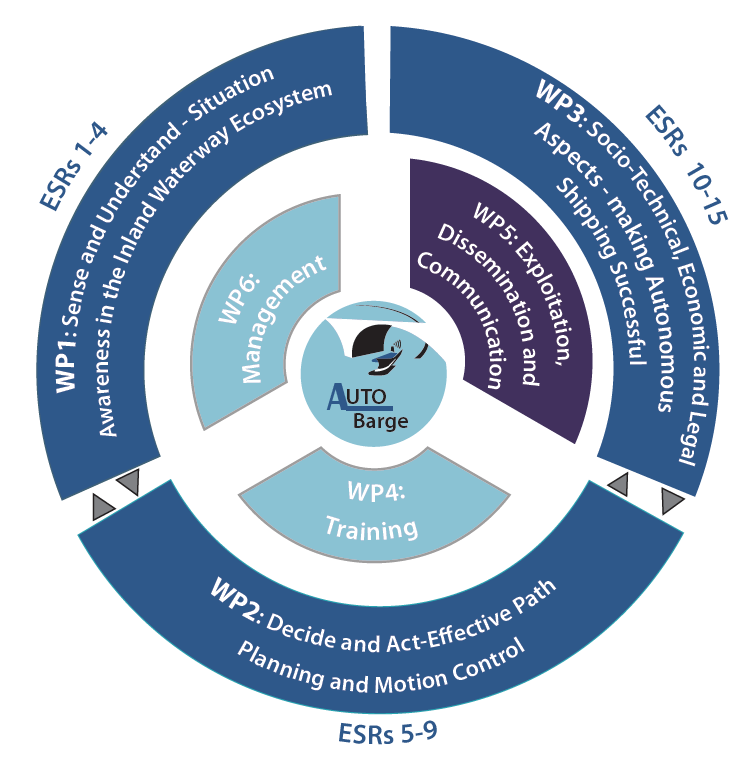
AUTOBarge bietet das allererste Trainingsprogramm für die Anwendung von unbemannten oder autonomen Schiffen für die intelligente Binnenschifffahrt und deren Rolle in der gesamten multimodalen Transportaktivität in Europa. Die interdisziplinären Anforderungen, die erforderlich sind, um das Gesamtziel von AUTOBarge zu verwirklichen, sind von solcher Komplexität, dass wir ein großes Ausbildungsnetzwerk, an dem einige der führenden europäischen Unternehmen - wie Kongsberg Maritime und Damen Shipyards - zusammen mit führenden europäischen Universitäten auf diesem Gebiet - wie KU Leuven und NTNU - und industrienahen Forschungsorganisationen - darunter IDIT und VTT - beteiligt sind, als den besten Weg ansehen, um die damit verbundenen wissenschaftlich-technischen (S/T) Herausforderungen zu bewältigen, die im Folgenden kurz beschrieben werden und die das Ziel der drei wissenschaftlich-technischen (W/T) Arbeitspakete (WP) des Projekts sein werden:
Herausforderung 1 (WP1): Maximierung des Situationsbewusstseins (Spüren und Verstehen) eines unbemannten oder autonomen Binnenschiffs durch Erfassung des Zustands und der Manövrierfähigkeit des Schiffs selbst, des Standorts und der Bewegung anderer Schiffe, anderer relevanter statischer und beweglicher Objekte in der Umgebung, von Merkmalen wie Bojen oder Verkehrsschildern sowie der drahtlosen Kommunikation von Informationen zwischen den verschiedenen Akteuren auf der Wasserstraße.
Herausforderung 2 (WP2): Nutzung des oben genannten Situationsbewusstseins (Entscheiden und Handeln) für eine sichere, robuste und energieeffiziente Pfadplanung und Bewegungssteuerung des autonomen Binnenschiffs mit dem Schwerpunkt auf modellprädiktiver Steuerung, Steuerungsmethoden, die durch maschinelles Lernen in Echtzeit unterstützt werden, Energieeffizienz und Fehleridentifizierungs- und -isolierungsschemata, so dass diese den Betrieb der autonomen Schiffe nicht negativ beeinflussen.
Herausforderung 3 (WP3): Eingehende Analyse der sozio-technischen, wirtschaftlichen und rechtlichen Aspekte, die erforderlich sind, um die autonome Binnenschifffahrt in naher Zukunft zu einem Erfolg zu machen, einschließlich der Gewährleistung der Sicherheit, der kollaborativen Entscheidungsfindung für eine maximale Leistung, der Logistik, der wirtschaftlichen Vorteile und der erforderlichen Änderungen des regulatorischen Rahmens.
Projektergebnisse
Das Projekt ist beendet. Die Projektergebnisse und Publikationen, die im Rahmen des Projekts erarbeitet wurden finden Sie hier.
Projekt-Website
etn-autobarge.eu